| Shapeoko-T mit Raspberry Pi und LinuxCNC |
|
|
1 2
|
|
|
|
|
|
|
13.04.22 18:05
Ronald  Moderator

|
Re: Shapeoko-T mit Raspberry Pi und LinuxCNC
Hallo Claus,
ja, ich weiss, eine Anleitung wäre natürlich sehr hilfreich. Gerade bei der Shapeoko-T, die nicht so oft verkauft wird ist der Aufwand-Nutzen einer Anleitung nicht ganz so hoch. Aber egal, mir fehlt dafür leider die Zeit. Vielleicht habe ich mal mehr Zeit, wenn andere Projekte/Aufgaben bei mir wegfallen. Ich sage aber immer allen meinen Kunden, dass wenn Sie Fragen haben, dann sollen Sie mich bitte "sofort" anrufen.
Zu Deinen Anmerkungen:
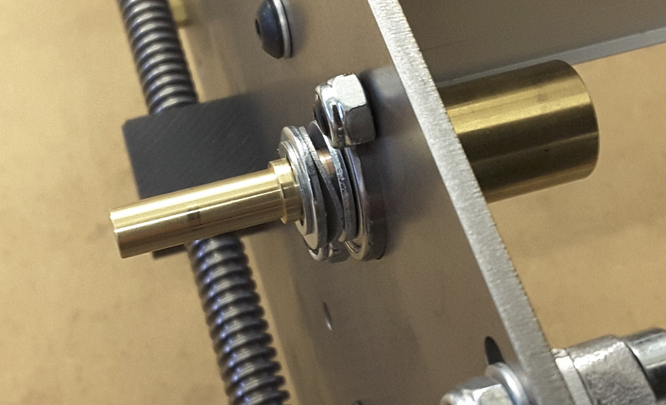
- Die Gewindehülsen sollen eigentlich mit 2-Komponenten Kleber eingeklebt werden. Dass haben wir hier im Forum so auch schon mal besprochen. Und zwar so, dass sie zum Kleben auch schon mal eingebaut werden um in der Flucht zu sein.
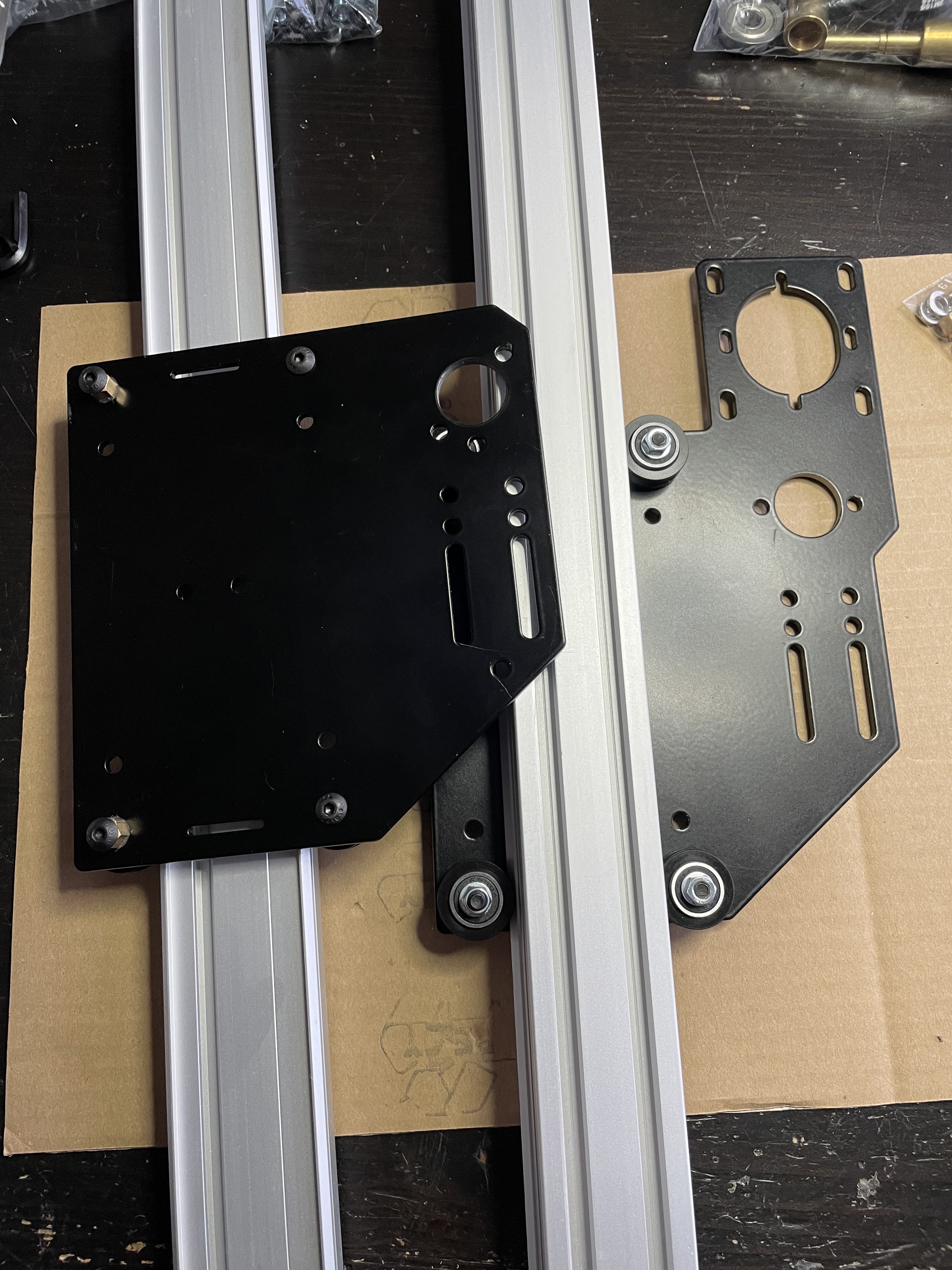
- Daher wurde auch das Kugelager, das gegenüber der Hülse ist geändert. Früher waren hier auch Hülsen die 3D-gedruckt waren. Damit man aber besser die Gewindestange einfach nur durchschieben muss, wurden die Kugellager mit einem Innendurchmesser von 12mm nun verwendet. Das heißt, die Festlager-Hülsen werden auf der einen Seite im Kugellager befestigt, und dann die Gewindestange von der gegenüber liegenden Seite reingeschoben. Dann noch etwas Kleber dran und in die Hülse schieben. Dann aushärten lassen. Dass sollte so dann passen.
- Die Anzahl an Unterlegscheiben und Federringen ist richtig so. Wenn es nicht passt. ist entweder etwas falsch zusammen gebaut, ev. das falsche Kugellager genommen? Oder der Einstich für die Sicherungsscheibe ist vom Hersteller falsch gesetzt worden? Dass wäre dann ein Herstellungsmangel, und die Hülse würde ich dann natürlich ersetzen. Bitte mal alle Hülsen und Einstiche miteinander vergleichen. Und auch nochmal die Kugelllager genau anschauen. Die mit 12mm Innendurchmesser sind etwas schmaler als die mir 8mm Innendurchmesser!!
- Gewindebohrer: Ich selber hatte sehr viel Probleme mit den Gewindebohrern. Gerade noch die 5mm Bohrer brechen wirklich sehr gerne ab. In eloxiertem Aluminium sind geschnittene Gewinde sogar nicht so gut, da die eloxalschicht 5x härter ist als das reine Aluminium. Aus all diesen Gründen haben wir uns für das "Gewindeformen", ja, das gibt es tatsächlich, entschieden. Durch die spezielle Innensternform der Löcher in den Profilen kann eine normale M5 Schraube (die liegt einzeln im Beutel mit den Laufrollen; M5x20) verwendet werden, um die inneren Stege zu quetschen und so die Eloxalschicht nicht zu verletzen um ein geeignetes Gewinde zu formen! Das klappt, wenn man es einmal versucht, wirklich sehr gut. Das Gewinde behält seine außerordentliche Stabilität. Sollte mal ein Gewinde abreißen, kann dieses durch einschrauben einer längeren Schraube einfach wieder verlängert werden.
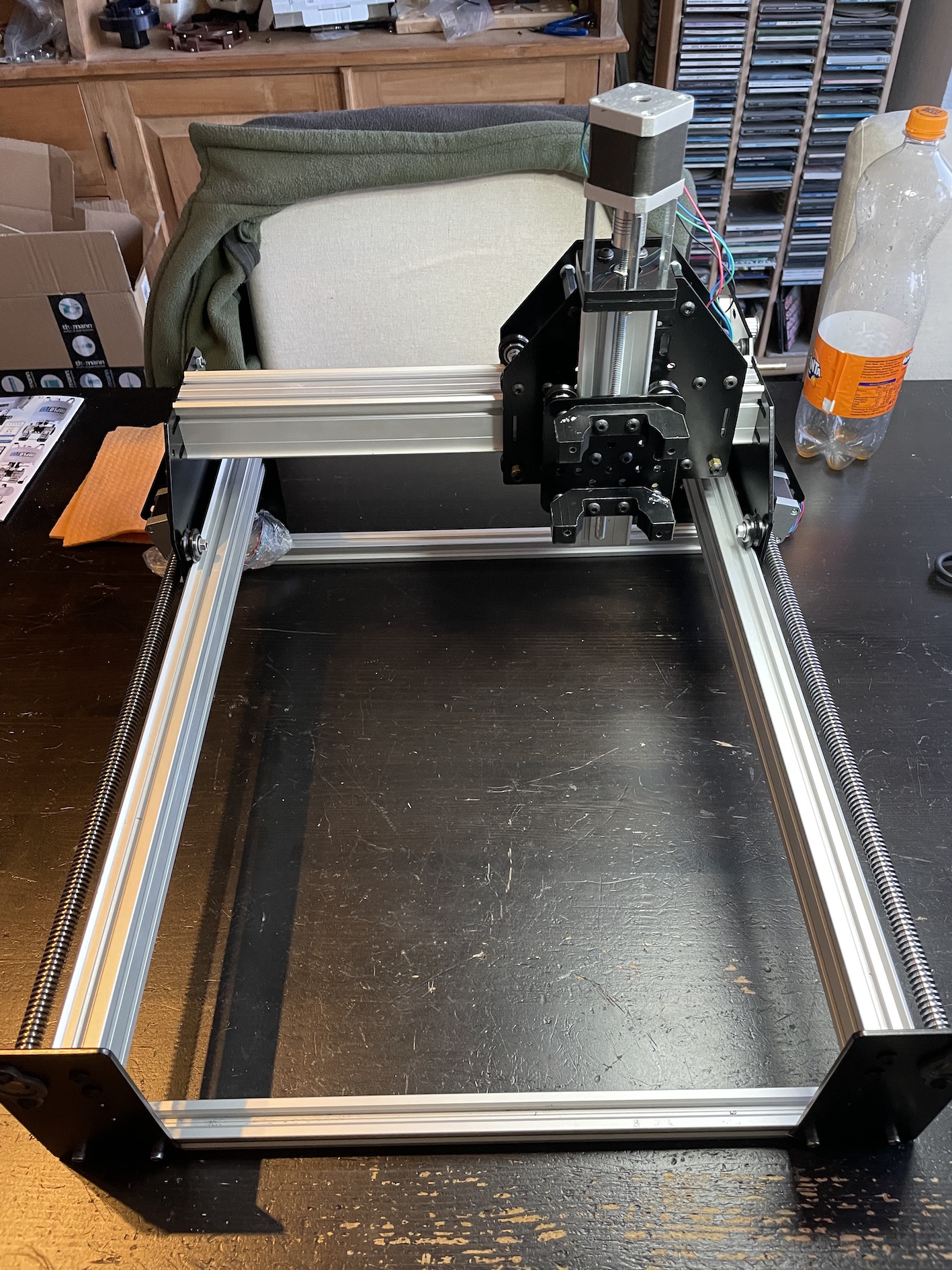
- Deine Halterung, die Du 3D-gedruckt hast, sieht natürlich viel eleganter aus. Übrigens in den Blechen an denen das 12mm Kugellager ist, könntest Du Deinen M5 Gewindebohrer sehr gut verwenden. Da habe ich die Löcher so geplant, dass hier tatsächlich ein Gewindebohrer verwendet werden muss, was ich eigentlich später nicht mehr wollte. Die Löcher habe ich vergessen vor dem Lasern größer zu machen!
So. jetzt bin ich mal gespannt auf den restlichen Aufbau und die Steuerung mit einem Rasberry Pi. Ich freue mich auf weitere Posts.
LG Ronald
Zuletzt bearbeitet am 13.04.22 18:14
|
|
|
|
|
|
|
|
|
|
|
|
21.04.22 09:42
Ronald Moderator
|
Re: Shapeoko-T mit Raspberry Pi und LinuxCNC
Respekt!
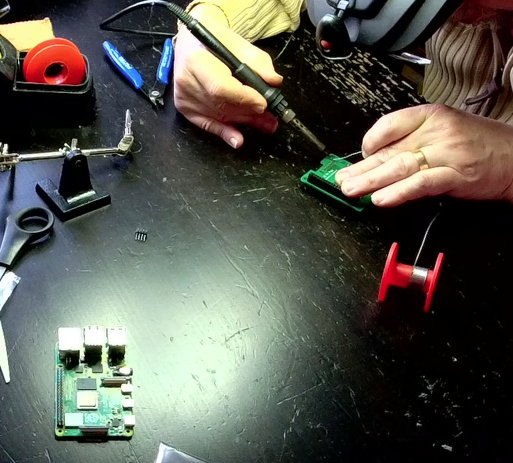
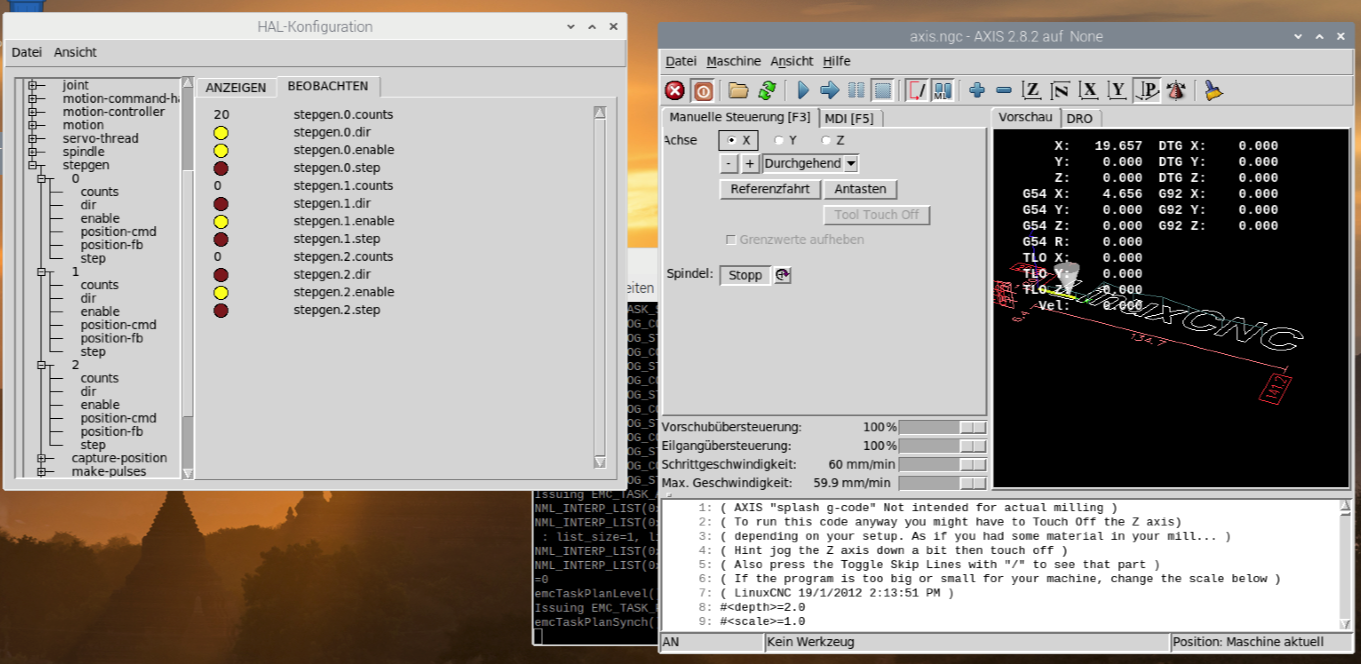
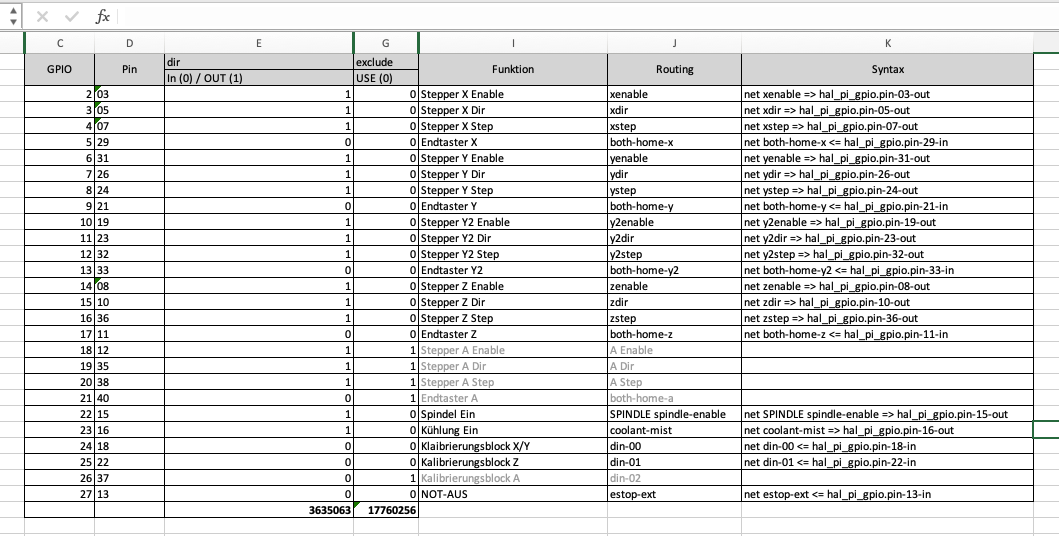
Wenn dass so mit dem LinuxCNC auf dem Pi und den GPIOs funktioniert, dann könnte man ja mal eine kleine huckepack Platine entwerfen, die die richtigen Signale liefert und ev. gleich die POLOLU-Treiberbausteine mit drauf hat.
Ich hatte mich bisher immer davor gescheut, weil solche Platinen bisher immer einen eigenen Atmega328 drauf hatten und ich das semioptimal fand. Wenn es jetzt direkt mit den IO-Anschlüssen geht, und es keine Timingprobleme gibt, dann wäre das mal wieder ein Hoffnungsschimmer!
Wäre auch gespannt, ob man dann auch 5-Achsen verwenden könnte?
Ich bin sehr gespannt auf die weiteren Fortschritte!
LG Ronald
|
|
|
|
|
|
|
|
1 2
|

 Anmelden
Anmelden