Na klar is der Jumper richtig gesetzt hat doch bei den Nema17 funktioniert und mit nem anderen Pololu fuktionierts doch auch, muss also am Pololu direkt liegen.
Ich habe mal gegoogelt Messpunkt da liegen bei mir 19V an, dort sollte doch aber eine Referenzspannung anliegen. ich kann aber den Wiederstand nicht messen (Messgerät zu grob ^^) oder soll das auf den Wiederständen R100 heisen?
ich bin gerade dabei das WIKI diesbezüglich zu erweitern. Dabei bin ich auf diese Seite gestoßen, die ich hier vorübergehend angeben möchte, bis ich meine WIKI-Seite damit erweitert habe: http://www.my-home-fab.de/Documentations...m-einstellen/de
19V am Mittelabgriff des Potis ist definitiv zu viel. Hier vermute ich einen Defekt des Bausteins oder einen Kurzschluss auf der Platine.
Übrigens ist das Microstepping beim A4988 und DRV8825 nach hinten raus definitiv unterschiedlich, da der DRV ja höheres Microstepping unterstützt. Die Tabelle dafür erarbeite ich gerade fürs WIKI. Vorab bitte in die Datenblätter schauen.
Hallo, ich habe mittlerweile paar Sachen probiert, hab mir auch noch paar neue DRV8825 versorgt. Ich hatte auch noch ein schönes Video gefunden und dann folgendes probiert:
- Nur Netzteil ans GRBL Shield -> 19V zwischen dem Löchlei und Poti - Nur USB an den Arduino -> nix zu messen
Dann wurde ich sturtzig das der Typ im Video immer von Masse aus misst (in der ecke quasi) hatte ich auch probiert aber auch ohne Erfolg.
Beim A4988 kann ich allerdings mit USB einen wert von 0,65V zwischen Poti und Masse (GND) messen nur die DRV lassen sich nicht messen
Aaaaaber
Wenn ich aber Netzteil und Adruino mit USB verbinde kann ich zwischen Masse (GND) und dem Poti messen und bekomme/bekam einen wert von 1,75 V den ich auch auf 1V verändern kann. (im UZS->weniger, gegen UZS->höher) Die 19V zwischen Poti und dem Messpunkt sind dann aber immernoch messbar.
Ich hatte allerdings dann die Masse vom GRBL Shield Stromanschluss angezapft welche auch durchgang zum DRV hat.
Mit dem Vref von 1V liege ich doch sicher richtig, dass dann die Begrenzung auf 2A liegt oder?, dann würde es bedeuten dass der DRV versucht hatte 3,5A zu liefern was ihn überhitzen lies.
Ich habe zu der Kombination NEMA23 (57BYGH218) mit GRBL auch eine paar Fragen:
Es gibt hier die Aussage von Ronald daß die NEMA23 4-5 Ampere vertragen. Da NEMA23 ja eigentlich nur eine Bauform ist, kann man das vermutlich so nicht stehen lassen? Der 57BYGH218 ist laut Datenblatt mit 2A Rated Current angegeben. Laut der Pololu Seite soll man diesen Strom maximal am Treiber einstelen. Von daher sollte der Treiber doch für zumindest diesen NEMA23 ausreichend sein?
Nächste Frage: GRBL Parameter step pulse ($3 bei v0.8 bzw. $0 bei v 0.9) Hier soll laut GRBL Seite der Wert aus dem Datenblatt des Motors verwendet werden. Dazu findet sich in den im Shop verlinkten Datenblättern allerdings keine Angabe.
Für NEMA17 kursiert hier im Wiki der Wert 30, im Netz findet man Werte von 3 bis 30. Ich habe 3, 5, 10 und 30 ausprobiert ohne Unterschiede feststellen zu können.
Hier wäre die Bitte an Ronald beim Motorhersteller nach dem korrekten Wert anzufragen.
Hintergrund: Ich habe auf der X-Achse mit den errechneten Werten 33.33 auf 50cm einen Fehler von 1mm. Laut Dokumentation muss es sich dabei ja dann um Schrittfehler handeln?
Ich habe die Laufrollen nochmal etwas gelockert und die Zahnriemenspannung etwas gesenkt, aber der Fehler bleibt. Die Y-Achse (doppelt motorisiert) zeigt diese Abweichung nicht. Ich vermute dass die Kraft durch den doppelten Antrieb größer ist und es daher nicht zu Schrittfehlern kommt?
Wären Schrittfehler überhapt so reproduzierbar? Denkbar wäre ja prinzipiell auch ein falscher Durchmesser des Pullys.
die Datenblätter der Schrittmotoren, genauer, die technischen Daten der Motoren hängen natürlich von deren Aufbau ab. Es ist richtig, dass mit NEMA23 nur die Stinfläche genormt ist. Nämlich 2,3x2,3 Zoll! Es wird damit aber auch eine Geräteklasse beschrieben. Es gibt keinen NEMA23 Motor mit so niedrigen "Leistungswerten" wie z.B. einen NEMA17 Motor!!! Ich meine hier wörtlich "Leistung" und nicht Spannung oder Strom!
Meine Motoren haben alle einen niedrigen Innenwiderstand, so dass hier mit voller Leistung gearbeitet werden kann, und diese nur durch die Steuerbausteine begrenzt werden. Der ...218 Motor z.B. könnte bei 24V und einem Innenwiderstand von 1,3 Ohm theoretisch 18,5A abbekommen! Das ist natürlich auf Dauer viel zu viel. Daher wird der Strom auf 2-3 A begrenzt. Der ideale Strom ist mit 2A angegeben. Kurzfristig ist auch etwas mehr drin!
Alle POLOLU-Kompatiblen Treiber sind mit 2A schon ganz schön am Limit! Die Bauteile werden unerträglich heiß! Daher immer meine Empfehlung leistungsstärkere Treiber zu verwenden (z.B. TB6560)!
Nun zum Parameter "step pulse": Hier wird die Pulsbreite angegeben, die mindestens am PIN Step am Treiberbaustein (A4988, DVR8825) anliegen muss, um eindeutig ein high oder low am Eingang zu erkennen. Diese Zeit im µs ist abhängig von der internen Taktfrequenz, die wiederum abhängig ist von den RC-Gliedern die am Baustein anliegen (CP1/CP2). Die mind. notwendige Pulsbreite definiert damit auch die max. mögliche Tacktfrequenz. Denn die Zeit zwischen zwei Taktimpulsen kann natürlich nicht kürzer sein, als ein Impuls lang sein muss!!
Das Datenblatt des A4988 fordert folgendes:
Danach müsste ein Stepimpuls lediglich 1µs lang sein. Was im Parameter $03=1 bedeuten würde. Um eine stabile Situation zu haben würde ich aber nie unter 10µs gehen. Dieses ist auch der Grund, warum Du keine Änderung bei deinen getesteten Werten feststellen konntest!
Was nun die Schritte angeht. Das kann von vielen Faktoren abhängen: schwergängige Laufrollen, zu stramme od. zu lockere Zahnriemen oder zu schwach eingestellte Motoren. (es gab hier im Forum mal einen Studenten, der die Genauigkeit der Fräse genauer unter die Lupe genommen hat!) Die Zahnscheiben können nicht variieren/ungenau sein! Wenn das so wäre, würden die Zähne der Zahnscheibe nicht genau passen. Die Anzahl der Zähne bedingt immer ein und denselben Außendurchmesser! HTD-3M mit 16 Zähnen hat immer einen Abrollumfang von 15,28 mm. Dabei wird hier immer ein imaginärer Zahnriemen auf die Zähne gelegt, und genau die Mitte des Zahnriemens als Abrollumfang angenommen! Also wird auf den Zahn immer noch die Hälfte der Zahnriemendicke, und zwar der Teil ohne die Zähne drauf gerechnet. Das ergibt dann 33.333! Dieses ist ein Dezimalpunkt und kein Tausenderpunkt!
Vielleicht können andere hier mal berichten, wenn es bei Ihnen auch erst nicht genau funktioniert hat, es dann aber noch hin bekommen haben!
Heute bin ich einen grossen Schritt mit meinem Schrittmotorproblem weitergekommen.
Zunächst hatte ich gelesen, dass das Pfeiffen dass ich bei meinen NEMA23 zusammen mit dem DRV8825 beobachte von der Versorgungsspannung beeinflusst werden kann.
Die Stromregelung stellt den Strom in den Wicklungen über ein PWM Verfahren, also durch schnelles Ein- und Ausschalten ein. Die Schaltfrequenz hängt von der Versorgungsspannung ab und liegt zwischen 12 bis 30V voll im hörbaren Bereich. Mit meinem Labornetzteil konnte ich das nachvollziehen. Bei 30V ist das Pfeiffen schon sehr hoch, so dass es sehr warscheinlich ist, dass es bei 36V nicht mehr hörbar ist.
Ich habe aktuell ein 24V Netzteil, da ich ggf. auf die stärkeren TB6560 Treiber umstellen wollte und diese maximal 24V vertragen, was das doch sehr unangenehme Pfeiffen schlüssig erklärt. Mein Labornetzgerät kann leider nicht mehr als 30V bereitstellen, so dass ich das nicht prüfen kann. Da Ronald allerdings 36V Netzteile verwendet und kein Pfeiffen beobachtet, kommt das wohl so hin.
Als nächstes wollte ich die Stromeinstellung an meinen DRV8825 überprüfen. Da das bei nicht angeschlossenen Motoren erfolgen soll, ich die Zuleitungen allerdings verlötet hatte, sah mein Plan vor die Treiber vom GRBL Shield abzuziehen und in einer eigens gebastelten fliegend verdrahteten Adapterlösung einzustellen.
Das Experiment endete mit einem defekten DRV8825. Offenbar ist der Kondensator bei Verwendung von langen Zuleitungen überlebenswichtig..
Nun hatte ich ideale Voraussetzungen und genügend Motivation um die 4 China Treiberboards mit dem TB6560 in Betrieb zu nehmen, die ich vorsorglich kurz nach Bestellung des Bausatzes via eBay bestellt hatte.
Ich habe also mal wieder alles auseinandergeschraubt und den Arduino Träger neu aufgebaut. Zunächst wurde das GRBL Shield entfernt. Dann wurden an 3 Stellen M3 Gewinde gebohrt, um die Treiberboards oberhalb des Arduinos auf Distanzbolzen zu montieren. Diese lassen sich mit 35mm M3 Distanzbolzen schön zu einem Turm stapeln.
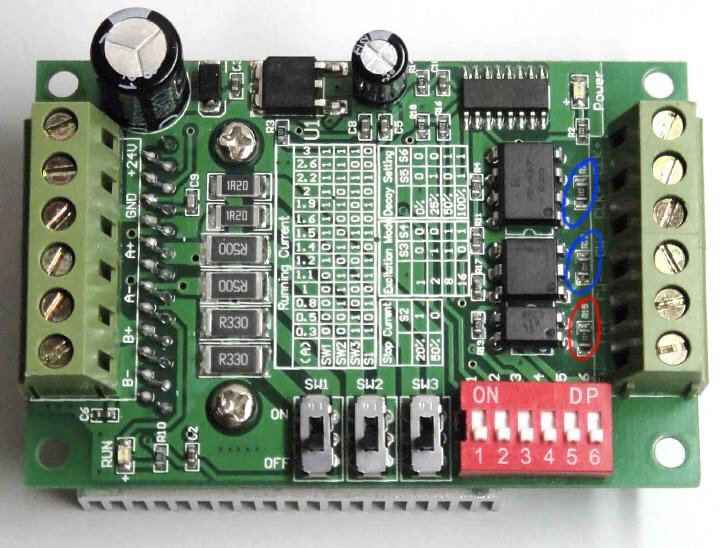
Die Steuereingänge der Boards sind über Optokoppler galvanisch vom Leistungsteil getrennt, was den Vorteil hat dass die Ausgänge des Arduinos geschützt sind. Da es sich bei den Eingängen der Optokoppler um LED's handelt fliesst dort entsprechend ein nicht unerheblicher Strom der durch Vorwiderstände von 300 Ohm auf ca. 12,5mA begrenzt wird.
(TB6560 mit markierten Vorwiderständen: ENABLE in Rot, STEP und DIR in Blau)
Da 4 Treiber für die 4 Motoren benötigt werden, sind entsprechend vier mal je drei Eingänge anzusteuern (Enable, Dir, Step). Die Eingänge DIR und STEP der beiden Y-Treiber müssen zusammengefasst werden, da sie parallel laufen. Es wäre möglich die Eingänge parallel anzuschliessen da der Arduino maximal 40mA mit einem Port treiben kann.
Allerdings müssen alle 4 ENABLE Eingänge ebenfalls gemeinsam angesteuert werden, da dafür beim GRBL nur ein Port für alle Achsen vorgesehen ist. Das wäre dann mit 50mA zu viel für einen Port. Abgesehen davon wäre die Gesamtlast von 3x4x12,5=150mA am Limit für den Gesamtstrom von 150 mA aus allen Ausgängen des Arduino.
Es bietet sich somit an, die ENABLE Eingänge sowie STEP und DIR der beiden Y-Treiber in Serie zu verdrahten. Dazu muss dann aber der Vorwiderstand geändert werden. Aus den gemessenen 12,5 mA bei 5V Versorgungsspannung und 300 Ohm Vorwiderstand ergibt sich eine Vorwärtsspannung von 1,2 V der LED im Optokoppler.
Für den Vorwiderstand der Y-Treiber ergibt sich daraus ein Wert von insgesamt (5V-(2x1,2))/0,0125A = 208 Ohm. Man kann nun an beiden Y-Treibern die Step und Dir Vorwiderstände durch 100 Ohm ersetzten, oder an einem der beiden je 220 Ohm und eine 0R Brücke am anderen verwenden.
Für den Vorwiderstand der ENABLE Eingänge ergibt sich ein Wert von insgesamt (5V-(4x1,2))/0,0125A = 16 Ohm. Man kann nun an allen Treibern die ENABLE Vorwiderstände durch 4 Ohm ersetzten, oder eine andere Kombination aus Widerständen verwenden die in der Summe ca etwa 16Ohm ergeben.
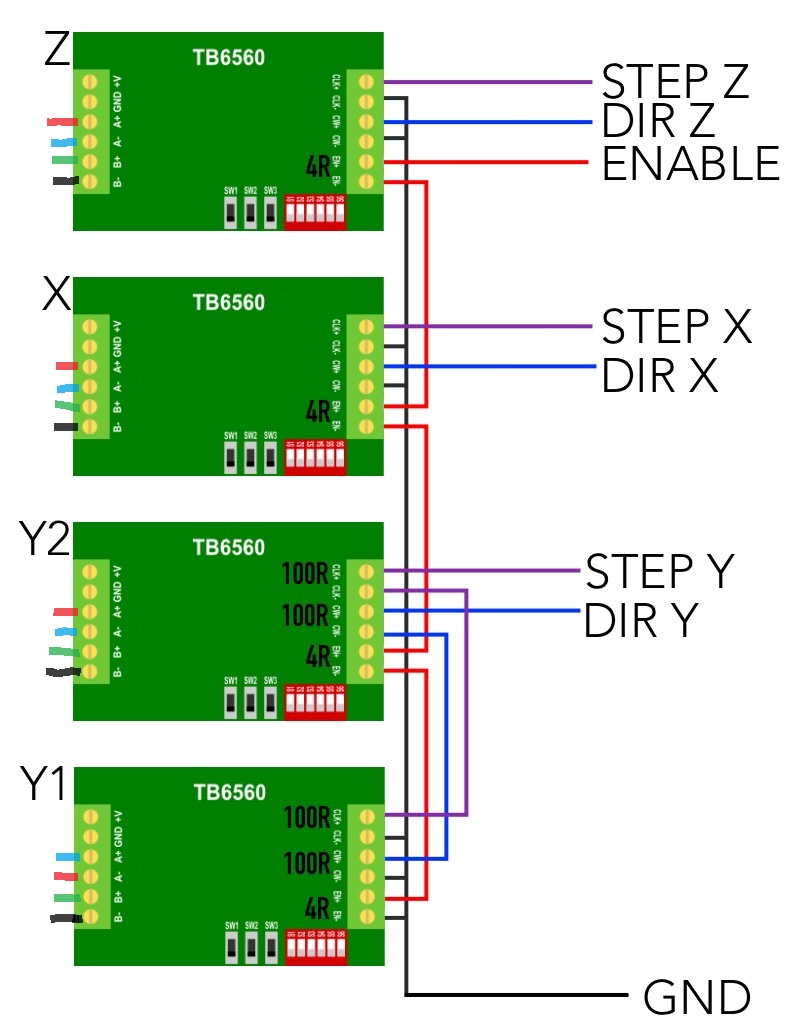
Es ergibt sich folgende Verkabelung:
Das ganze harmoniert perfekt mit meinem 24V 15A Netzteil und ist völlig frei von Pfeifgeräuschen. Ich kann diese Lösung für die ShapeOko-MAX mit NEMA23 wärmstens empfehlen!
Da die Forwärtsspannungen der Optokoppler offenbar recht weit streuen, muss nach dem Ändern der Widerstände der Strom kontrolliert werden. Dazu wird der jeweilige Signaleingang (ENABLE, Y-STEP, Y-DIR) mit 5V gegen Masse versorgt und der Strom gemessen. Dieser sollte nicht weit unter 12.5 mA liegen! Sonst kann es sein daß der Optokoppler nicht sauber durchsteuert, was zu unschönen Geräuschen in Folge unsauberer Motoransteuerung führt. Ggf. müssen die Widerstände verringert werden wenn der Strom zu klein ist.

 Anmelden
Anmelden